- I used a PicKit 3 Programmer from Microchipdirect. Part number PG164130 at a cost of $44.95 plus shipping. They normally ship 2nd day FedEx. I do not recommend purchasing any of the Chinese knock-off versions sold on ebay. It might save you a few dollars, but also might not program the servo firmware correctly.
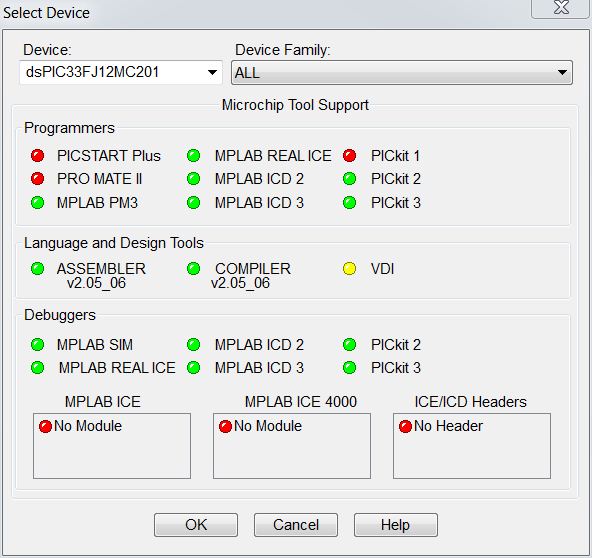
- Downloaded the MPLAB software this version is V8.91 A user guide is available here
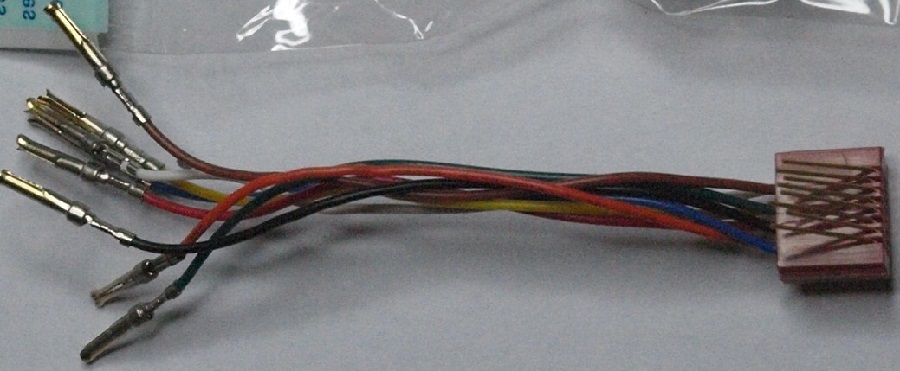
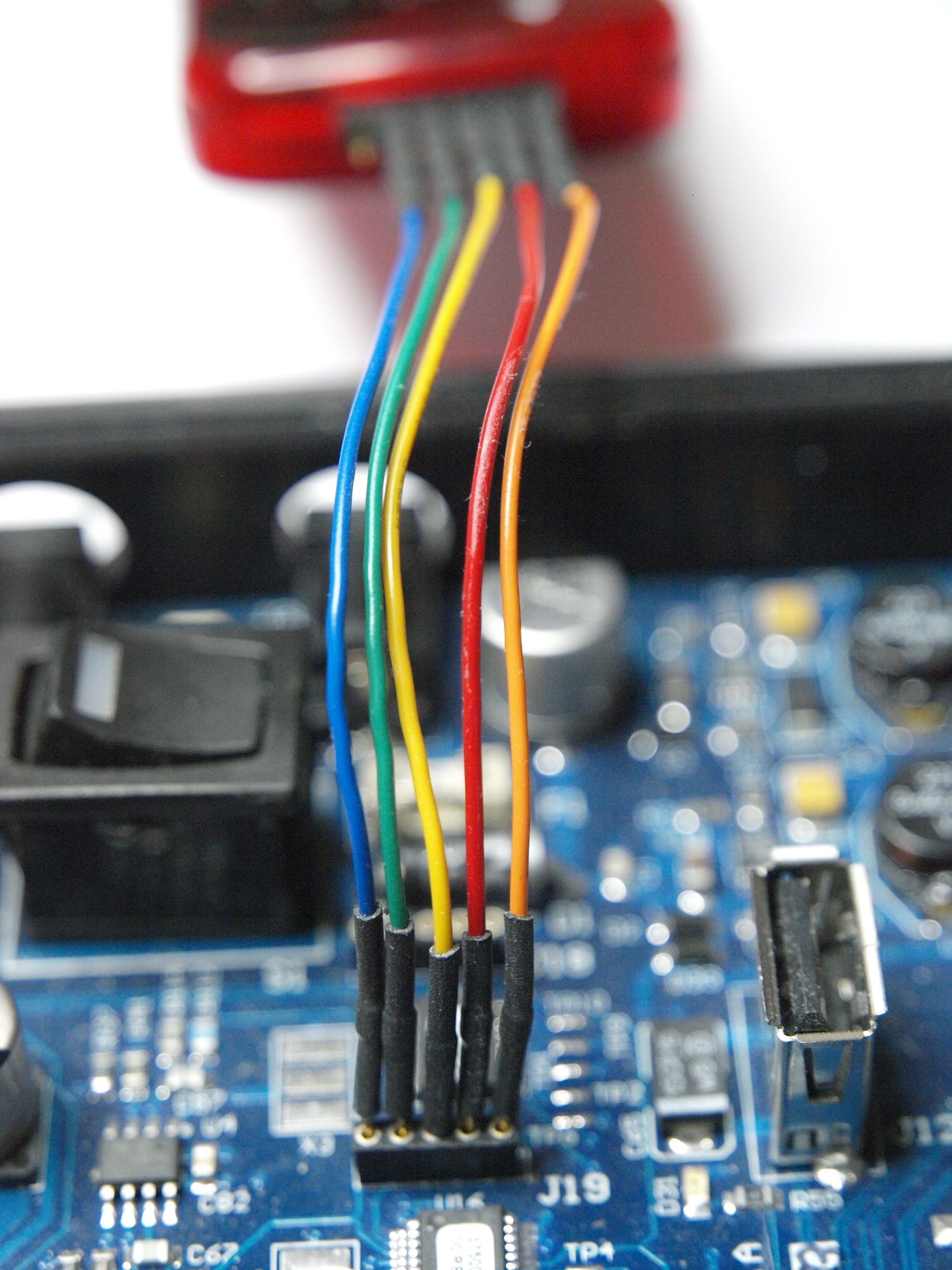
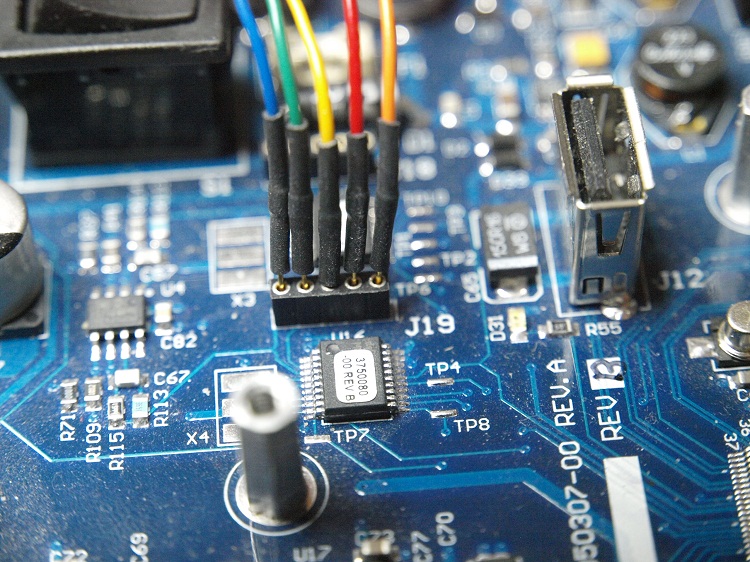
- You will also have to make an adapter. Here is a picture of the parts I started with to make the adapter. This adapter has 2.54mm (0.1.00") spacing male pins on one end to go into the Pickit3 connector, and 2.0mm (0.079") spacing with small diameter pins to fit into the sockets on the Gemini-2 board. This adapter uses 5 positions, to fit into the connectors of the Gemini-2. Please note that not all Gemini-2 boards was shipped with sockets. If your board does not have the sockets, then you will have to try and find 2mm pin sockets, and install them yourself. (not recommended as the circuit might have the holes filled with solder.)

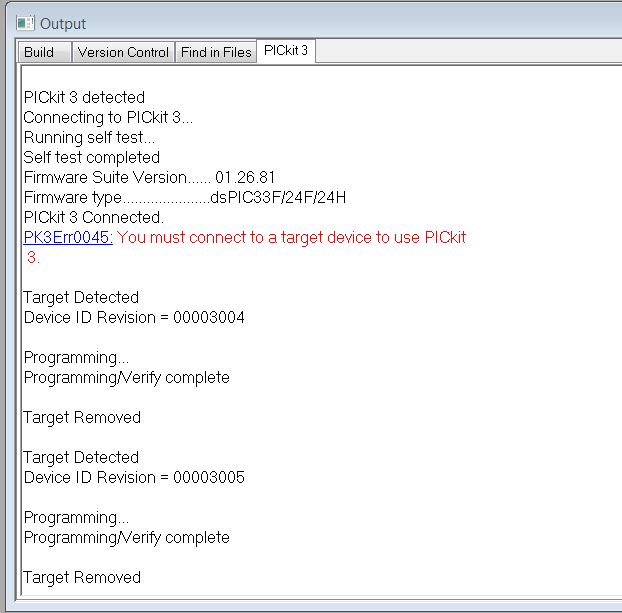
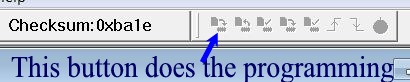
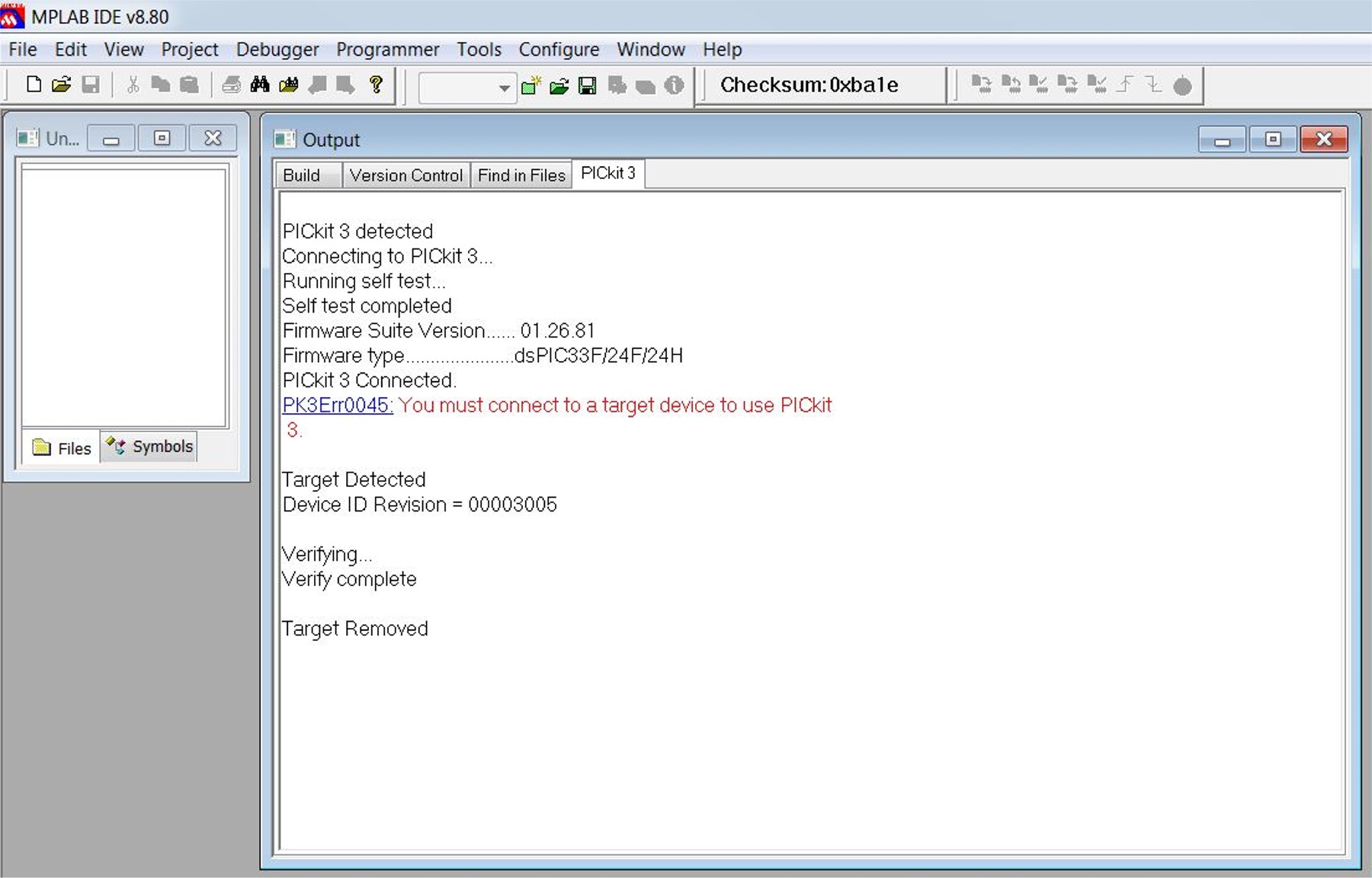
PicKit 3